Oxford pet#
This page shows application UNet architecture to the OxfordPet dataset.
import os
import wandb
import numpy as np
from PIL import Image
from tqdm import tqdm
from pathlib import Path
from typing import Callable
import matplotlib.pyplot as plt
import torch
from torch import nn
from torch.utils.data import DataLoader
import torchvision
from torchvision import transforms as T
from torchvision.datasets import OxfordIIITPet
import huggingface_hub
if torch.cuda.is_available():
DEVICE = torch.device("cuda")
elif torch.backends.mps.is_available():
DEVICE = torch.device("mps")
else:
DEVICE = torch.device("cpu")
print("using device", DEVICE)
# Determining where the notebook is run and the corresponding setup. If
# necessary, load all required credentials.
runned_in_free_server = False
if 'KAGGLE_KERNEL_RUN_TYPE' in os.environ:
print("Runned in Kaggle")
from kaggle_secrets import UserSecretsClient
user_secrets = UserSecretsClient()
wandb_token = user_secrets.get_secret("wandb_token")
hf_token = user_secrets.get_secret("hf_token")
runned_in_free_server = True
elif 'COLAB_GPU' in os.environ:
print("Runned in colab")
from google.colab import userdata
wandb_token = userdata.get("wandb_token")
hf_token = userdata.get("hf_token")
runned_in_free_server = True
if runned_in_free_server:
# Downloading extra source files
!wget https://raw.githubusercontent.com/fedorkobak/knowledge/refs/heads/main/python/torch/examples/unet/unet.py
wandb.login(key=wandb_token)
del wandb_token
huggingface_hub.login(hf_token)
del hf_token
from unet import (
DoubleConv,
Down,
Up,
run_epoch,
evaluate,
save_model,
load_model
)
using device cpu
Data#
Consider how model performs on the OxfotdIIIPet dataset. Here is an example of a sample that we will use for model fitting.
train_dataset = OxfordIIITPet(
str("OxfordIIITPet"),
target_types = "segmentation",
download = True
)
test_dataset = OxfordIIITPet(
str("OxfordIIITPet"),
target_types = "segmentation",
download = True,
split = "test"
)
test_picture_index = 500
picture, target = train_dataset[test_picture_index]
plt.figure(figsize = (10, 9))
plt.subplot(121)
plt.imshow(picture)
plt.axis(False)
plt.title("Picture")
plt.subplot(122)
plt.imshow(target)
plt.axis(False)
plt.title("Target")
plt.show()

This is a dataset where there are pictures of animals. Each pixel is labeled in such system:
1: animal.
2: backgroud.
3: border.
Consider unique numbers of some arbitrary target values.
torch.unique(T.PILToTensor()(target))
tensor([1, 2, 3], dtype=torch.uint8)
Transfomations#
The network does not understand images. So we have to create tensors from images. Here we have added some transformations to our dataset. Let’s see what they do.
transform = T.Compose([
T.Resize((256, 256)),
T.ToTensor(),
T.Lambda(lambda x: x.to(DEVICE))
])
target_transfrom = T.Compose([
T.Resize((256, 256)),
T.PILToTensor(),
# Classes are marked starting with 1 but in python it's easier to work with
# with sets that start with 0, so the following transformation fixes this
# inconvenience
T.Lambda(lambda x: (x - 1).long()),
# PILToTensor returns an image with an extra dimension for channels,
# but the target has only one channel, so we don't need that extra dimension.
T.Lambda(lambda x: x.squeeze()),
T.Lambda(lambda x: x.to(DEVICE))
])
transforms = torchvision.datasets.vision.StandardTransform(
transform, target_transfrom
)
train_dataset.transforms = transforms
test_dataset.transforms = transforms
This is the shape of the tensor used as input to the model - it’s regular three channel picture.
train_dataset[test_picture_index][0].shape
torch.Size([3, 256, 256])
This is the shape and unique values that appear in the target. So it’s just an array whose shape is the same as the shape of the input images, but it only takes three values.
print("Shape:", list(train_dataset[test_picture_index][1].shape))
print("Values:", list(train_dataset[test_picture_index][1].unique()))
Shape: [256, 256]
Values: [tensor(0), tensor(1), tensor(2)]
Model architecture#
The following cell deines achitecture that we’ll use for the model.
class UNet(nn.Module):
"""
Implementation of the final network.
"""
def __init__(self, n_channels, n_classes):
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.inc = DoubleConv(n_channels, out_channels=32)
self.down1 = Down(in_channels=32, out_channels=64)
self.down2 = Down(in_channels=64, out_channels=128)
self.down3 = Down(in_channels=128, out_channels=256)
self.bottleneck = Down(in_channels=256, out_channels=256)
# Input Up layer is concatenation by channels of the previous layer
# and corresponding down layer
self.up1 = Up(in_channels=512, out_channels=128)
self.up2 = Up(in_channels=256, out_channels=64)
self.up3 = Up(in_channels=128, out_channels=32)
self.up4 = Up(in_channels=64, out_channels=32)
# The last layer applies a convolution that preserves the dimensionality
# of the feature maps and returns as many channels as the number of
# predicted classes.
self.outc = torch.nn.Conv2d(
in_channels=32,
out_channels=n_classes,
kernel_size=1
)
def forward(self, x):
x1 = self.inc(x=x)
x2 = self.down1(x=x1)
x3 = self.down2(x=x2)
x4 = self.down3(x=x3)
x5 = self.bottleneck(x=x4)
x = self.up1(x=x5, x_left=x4)
x = self.up2(x=x, x_left=x3)
x = self.up3(x=x, x_left=x2)
x = self.up4(x=x, x_left=x1)
logits = self.outc(x)
return logits
Fitting#
Model fitting is complicated thing the best fitting algorithm is represented below.
torch.manual_seed(20)
model = UNet(n_channels=3, n_classes=3)
model.to(DEVICE)
batch_size = 8
learning_rate = 1e-3
wandb.init(
project="OxfordPetsUNet",
config={
"batch_size": batch_size,
"learning_rate": learning_rate
}
)
loss_fun = torch.nn.functional.cross_entropy
optimizer = torch.optim.Adam(params=model.parameters(), lr=learning_rate)
train_loader = DataLoader(train_dataset, batch_size=batch_size)
test_loader = DataLoader(test_dataset, batch_size=batch_size)
try:
for epoch in range(50):
run_epoch(
model=model,
loader=train_loader,
loss_fun=loss_fun,
optimizer=optimizer
)
train_accuracy, train_loss = evaluate(
model=model,
loader=train_loader,
loss_fun=loss_fun,
tqdm_desc="Evaluate train"
)
test_accuracy, test_loss = evaluate(
model=model,
loader=test_loader,
loss_fun=loss_fun,
tqdm_desc="Evaluate test"
)
wandb.log(
{
"train_loss": train_loss,
"test_loss": test_loss,
"train_accuracy": train_accuracy,
"test_accuracy": test_accuracy
},
step=epoch
)
except KeyboardInterrupt:
pass
Save model to the hugging face.
save_model(model=model, name="unet_model.pt")
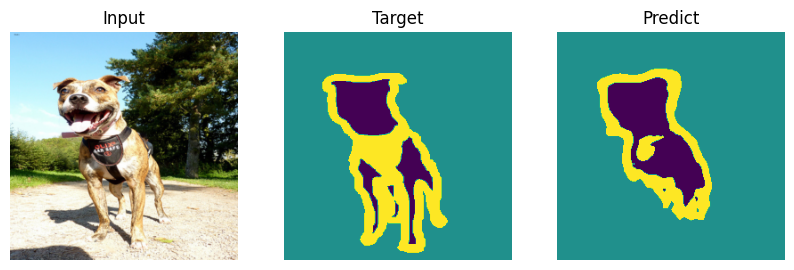
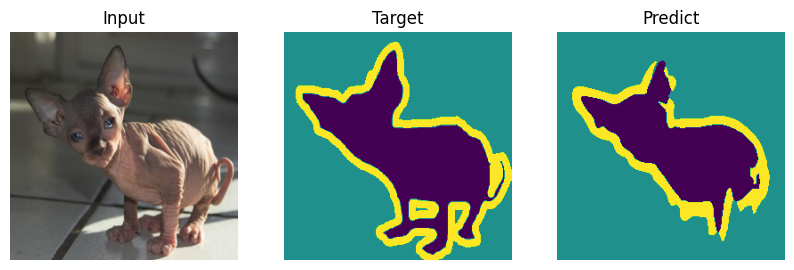
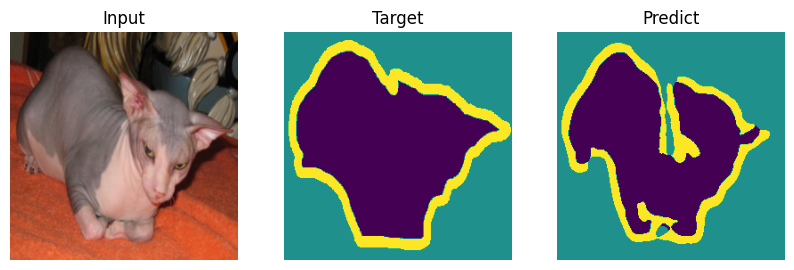
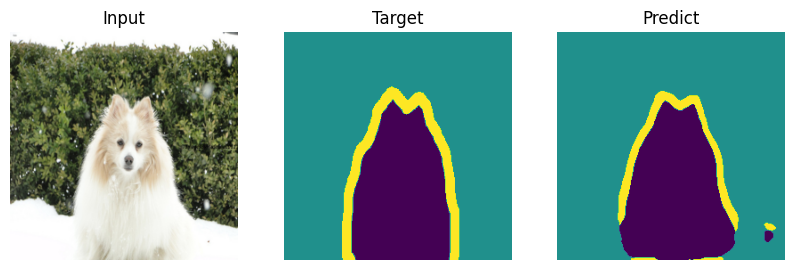
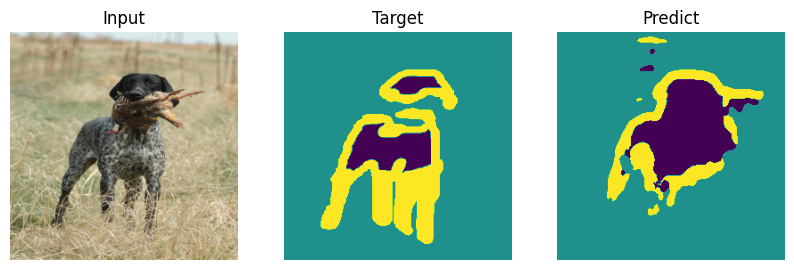
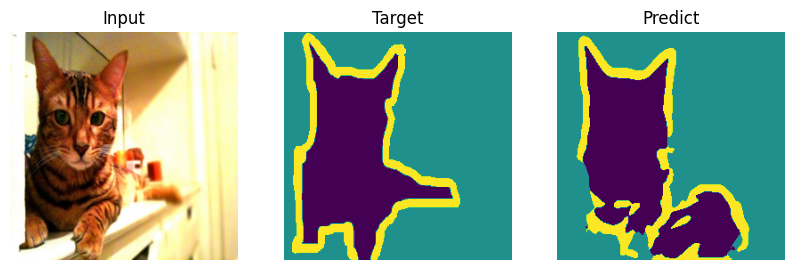
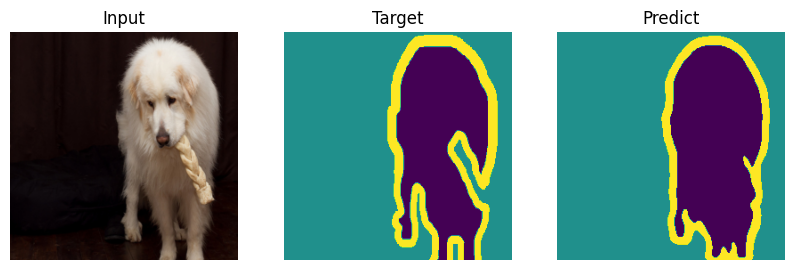
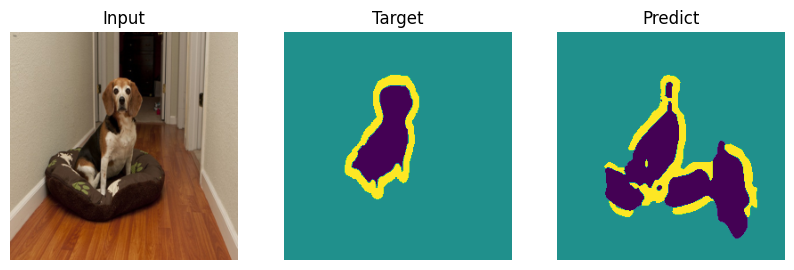
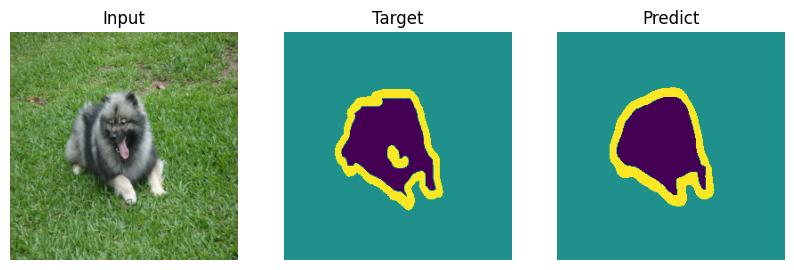
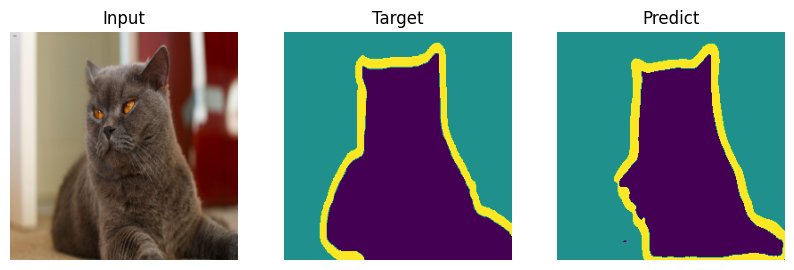
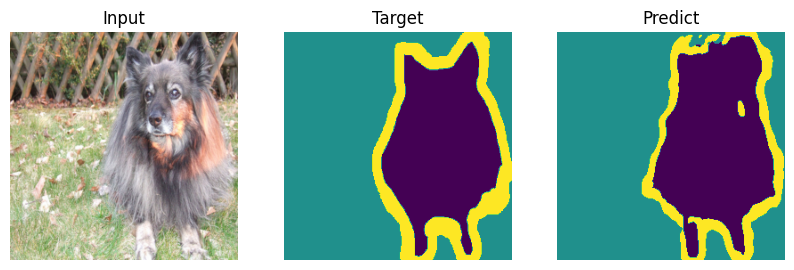
Evaluating#
Formal bemchmark is great but who actually cares what number you scored - let’s check on picutres. Everyone will draw their own conclusions about the quality of the model.
# importing the model
model = UNet(n_channels=3, n_classes=3)
load_model(model=model, name="unet_model.pt")
model = model.eval()
np.random.seed(20)
indx = np.random.randint(0, len(test_dataset), 20)
inputs = torch.stack([test_dataset[i][0] for i in indx])
targets = torch.stack([test_dataset[i][1] for i in indx]).to(torch.uint8)
predicts = model(inputs).max(dim=1)[1].to(torch.uint8)
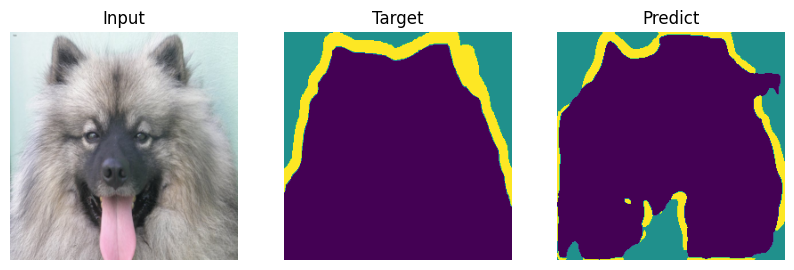
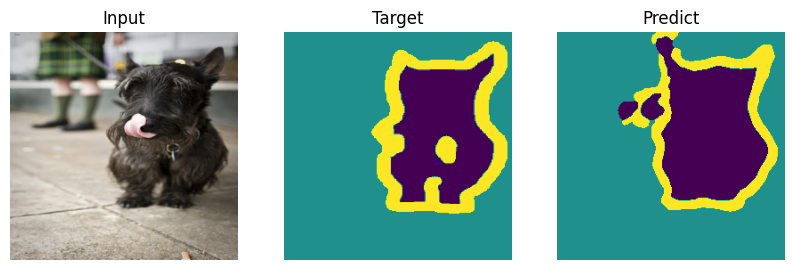
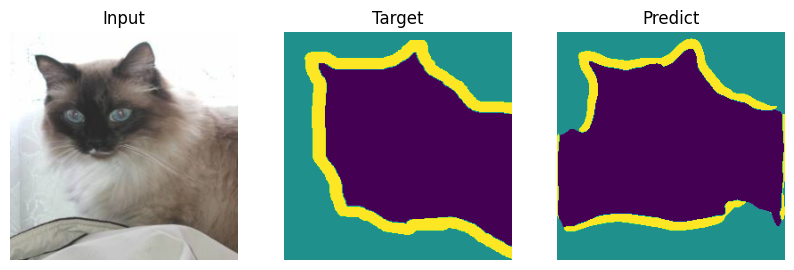
def plot_result(model_input, target, predict):
plt.figure(figsize = (10, 9))
plt.subplot(131)
plt.title("Input")
plt.imshow(T.ToPILImage()(model_input))
plt.axis(False)
plt.subplot(132)
plt.title("Target")
plt.imshow(T.ToPILImage()(target))
plt.axis(False)
plt.subplot(133)
plt.title("Predict")
plt.imshow(T.ToPILImage()(predict))
plt.axis(False)
plt.show()
for i in range(len(indx)):
plot_result(inputs[i], targets[i], predicts[i])